Abstract
Robot manipulation of rope-like objects is an interesting problem that has some critical applications, such as autonomous robotic suturing. Solving for and controlling rope is difficult due to the complexity of rope physics and the challenge of building fast and accurate models of deformable materials. While more data-driven approaches have become more popular for finding controllers that learn to do a single task, there is still a strong motivation for a modelbased method that could be used to solve a large variety of optimization problems. Towards this end, we introduced compliant, position-based dynamics (XPBD) to model rope-like objects. Using geometric constraints, the model can represent the coupling of shear/stretch and bend/twist effects. Of crucial importance is that our formulation is differentiable, which can solve parameter estimation problems and improve the matching of rope physics to real-life scenarios (i.e., the realto-sim problem). For the generality of rope-like objects, two different solvers are proposed to handle the inextensible and extensible effects of varied material stiffness for the rope. We demonstrate our framework’s robustness and accuracy on realto-sim experimental setups using the Baxter robot and the da Vinci research kit (DVRK) [1]. Our work leads to a new path for robotic manipulation of the deformable rope-like object taking advantage of the ready-to-use gradients.
Deformation estimation for inextensible rope on Baxter
Left:Raw RGB image. Right: The simulation result based on Thomas XPBD
Deformation identification and key points estimation for extensible rope on dVRK
Left: Original RGB image from Azure Kinect. Right: Simulation result for the extensible rope by using Jacobi XPBD solver
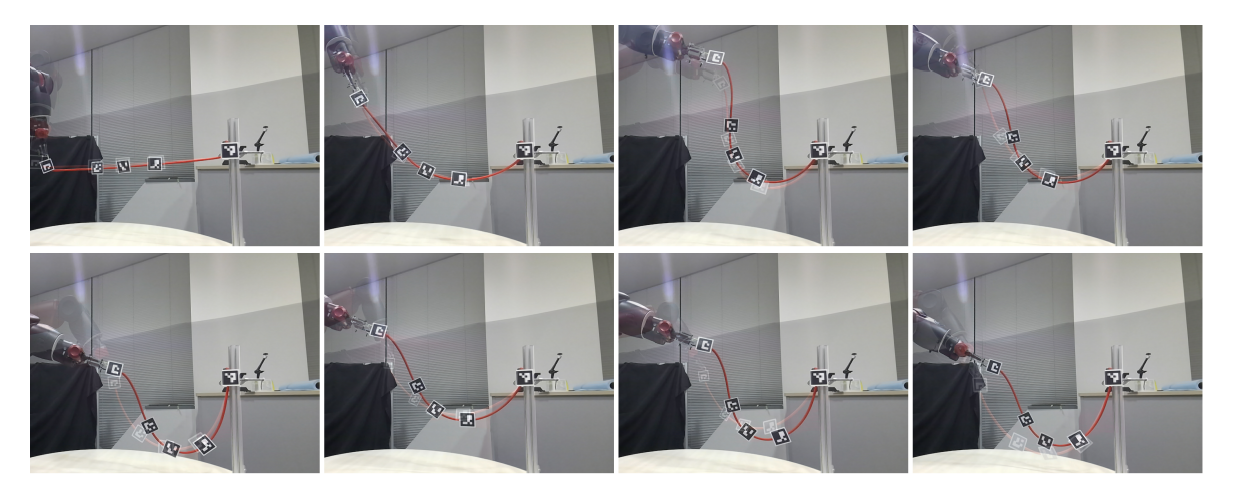
Shape control for inextensible rope on Baxter
Top Row: : The ideal shape control task by identified parameters. Bottom Row: The not-ideal cases. The target control shape for ropes are in low opacity, while our control results are in solid opacity.