|
I’m a PhD student at the University of Washington’s Paul G. Allen School of Computer Science and Engineering advised by Prof. Abhishek Gupta. I obtained my MS at UC San Diego, advised by Prof. Xiaolong Wang . Previously, I was also fortunate to work under the guidance of Prof. Michael Yip. Before that, I received my B.S degree in Electrical Engineering and its Automation from South China University of Technology . Email / Github / Google Scholar / Linkdin / |

|
|
I have a broad interest and research experience in Robotics, deformation modeling and manipulation, differentiable physical simulation, model-based and model-free control, sim-to-real transfer, dexterous manipulation and reinforcement learning. |
|
|
|
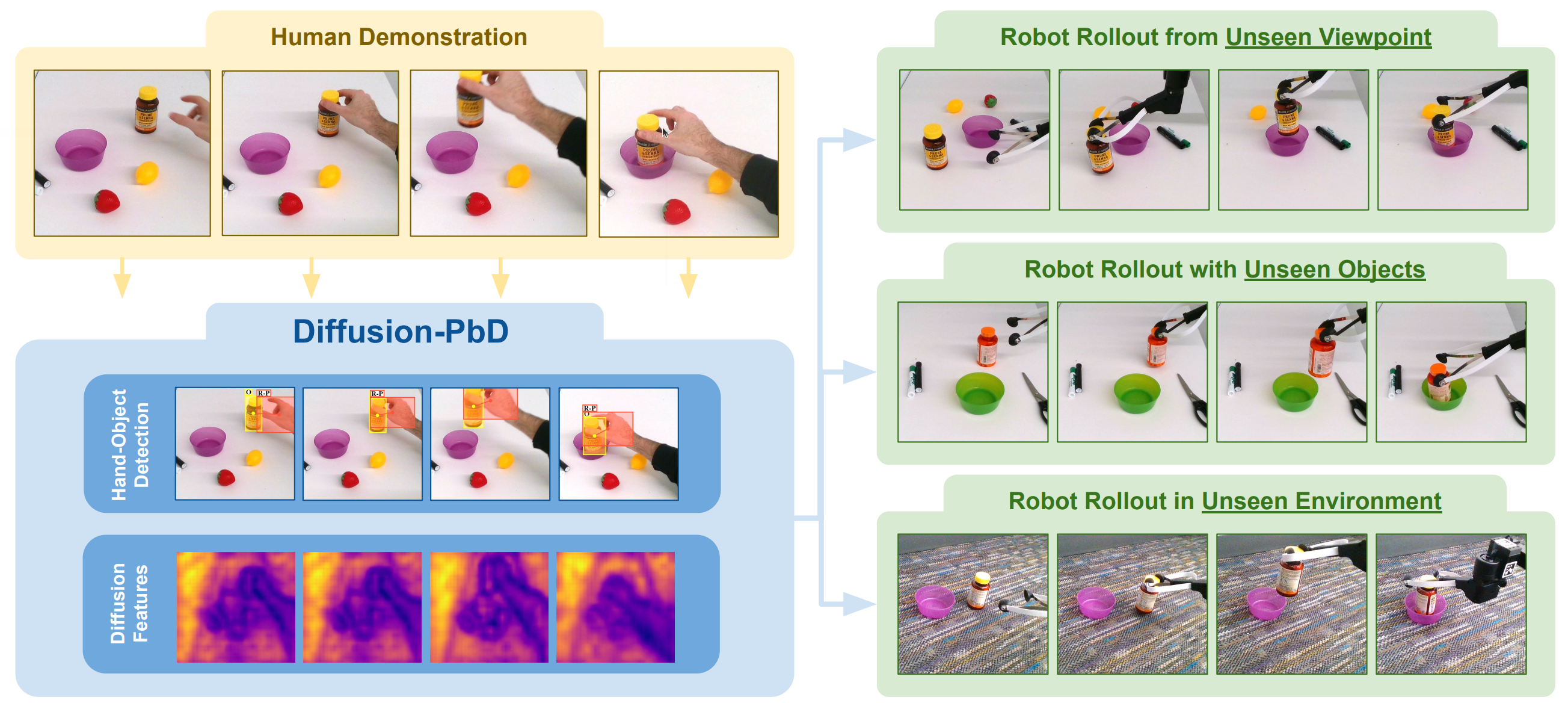
Hongchi Xia, Entong Su, Marius Memmel, Arhan Jain, Raymond Yu, Numfor Mbiziwo-Tiapo, Ali Farhadi, Abhishek Gupta, Shenlong Wang, Wei-Chiu Ma CVPR 2025 [arXiv][Website] |
|
[arXiv][Website] |
2023
|
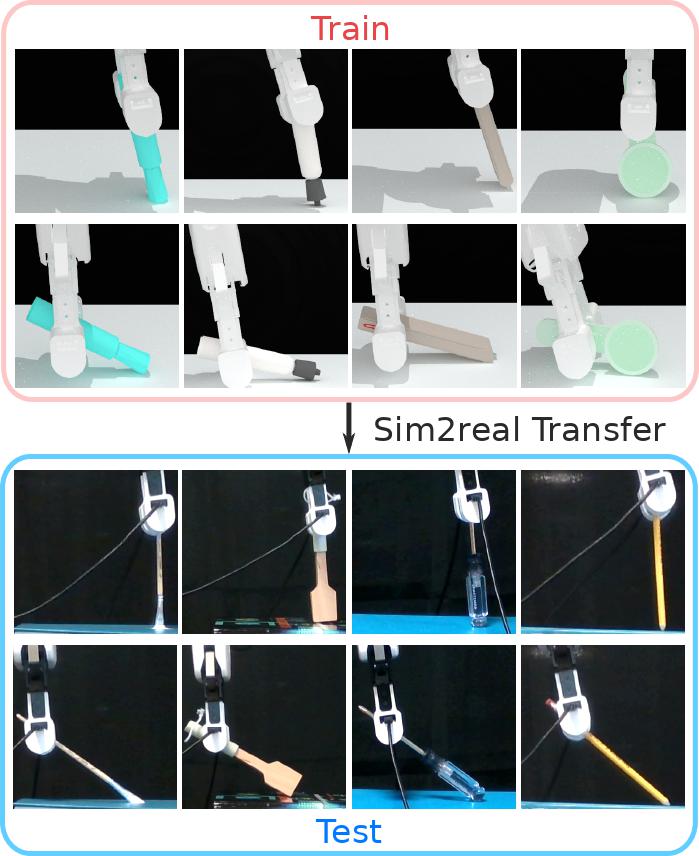
Entong Su , Chengzhe Jia, Yuzhe Qin, Wenxuan Zhou, Annabella Macaluso,Binghao Huang, Xiaolong Wang ICRA 2024 [arXiv][Website] |
2022
|
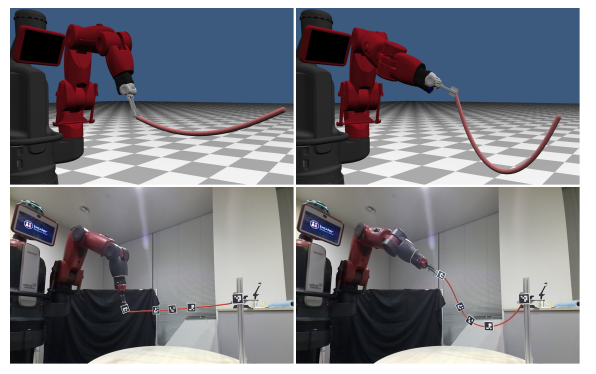
Fei Liu*, Entong Su*, Jingpei Lu, Mingen Li, Michael Yip IEEE Robotics and Automation Letters [arXiv][Website] |
|
Fei Liu*, Mingen Li*, Jingpei Lu, Entong Su, Michael Yip [arXiv][Website] |